Systems of Equations
TME 310 - Computational Physical Modeling
University of Washington Tacoma
Systems of equations
\[ x + 3y + 4z = 8\\ 4x - 2y + 8z = -4\\ -x + 4y + z = 12 \]
Solve for \(x\), \(y\), and \(z\)
We can solve any system of equations as long as…
- The number of equations is \(\geq\) the number of unknowns
- The equations are linearly independent
Solving systems of equations
In algebra, we learned different methods to solve for unknowns.
- Graphing
- Substitution
- Elimination
- Guess and check?
We’ll use matrices and concepts from linear algebra to get Python to solve systems of equations for us.
Matrix form
First, we need to put our system of equations into matrix form:
\[A\bf{x} = \bf{b}\]
- Coefficients matrix, \(A\)
- Unknowns vector, \(\bf{x}\)
- Constants vector, \(\bf{b}\)
\[ \begin{bmatrix} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \\ \end{bmatrix} \times \begin{bmatrix} x_{11}\\ x_{21}\\ x_{31}\\ \end{bmatrix} = \begin{bmatrix} b_{11}\\ b_{21}\\ b_{31}\\ \end{bmatrix} \]
System of equations example
\[ x + 3y + 4z = 8\\ 4x - 2y + 8z = -4\\ -x + 4y + z = 12 \]
\[ A= \begin{bmatrix} 1 & 3 & 4\\ 4 & -2 & 8 \\ -1 & 4 & 1 \\ \end{bmatrix} \]
\[ {\bf{x}} \to \begin{bmatrix} x\\ y\\ z\\ \end{bmatrix} \]
\[ {\bf{b}} \to \begin{bmatrix} 8\\ -4\\ 12\\ \end{bmatrix} \]
System of equations example
\[ x + 3y + 4z = 8\\ 4x - 2y + 8z = -4\\ -x + 4y + z = 12 \]
\[ \begin{bmatrix} 1 & 3 & 4\\ 4 & -2 & 8 \\ -1 & 4 & 1 \\ \end{bmatrix} \times \begin{bmatrix} x\\ y\\ z\\ \end{bmatrix} = \begin{bmatrix} 8\\ -4\\ 12\\ \end{bmatrix} \]
Solving
To solve for \(\bf{x}\), we “divide” both sides by \(A\) (i.e., multiply both sides by \(A^{-1}\)):
\[A{\bf{x}} = \bf{b}\]
\[A^{-1}A{\bf{x}} = A^{-1}\bf{b}\]
\[I{\bf{x}} = A^{-1}\bf{b}\]
\[{\bf{x}} = A^{-1}\bf{b}\]
Solved in Python
[[-4.87179487]
[ 1.28205128]
[ 2.25641026]]Linear independence?
What about the requirement that the equations in our system are “linearly independent”?
- The coefficients matrix (\(A\)) will have a non-zero determinant if the system is linearly independent.
Engineering example
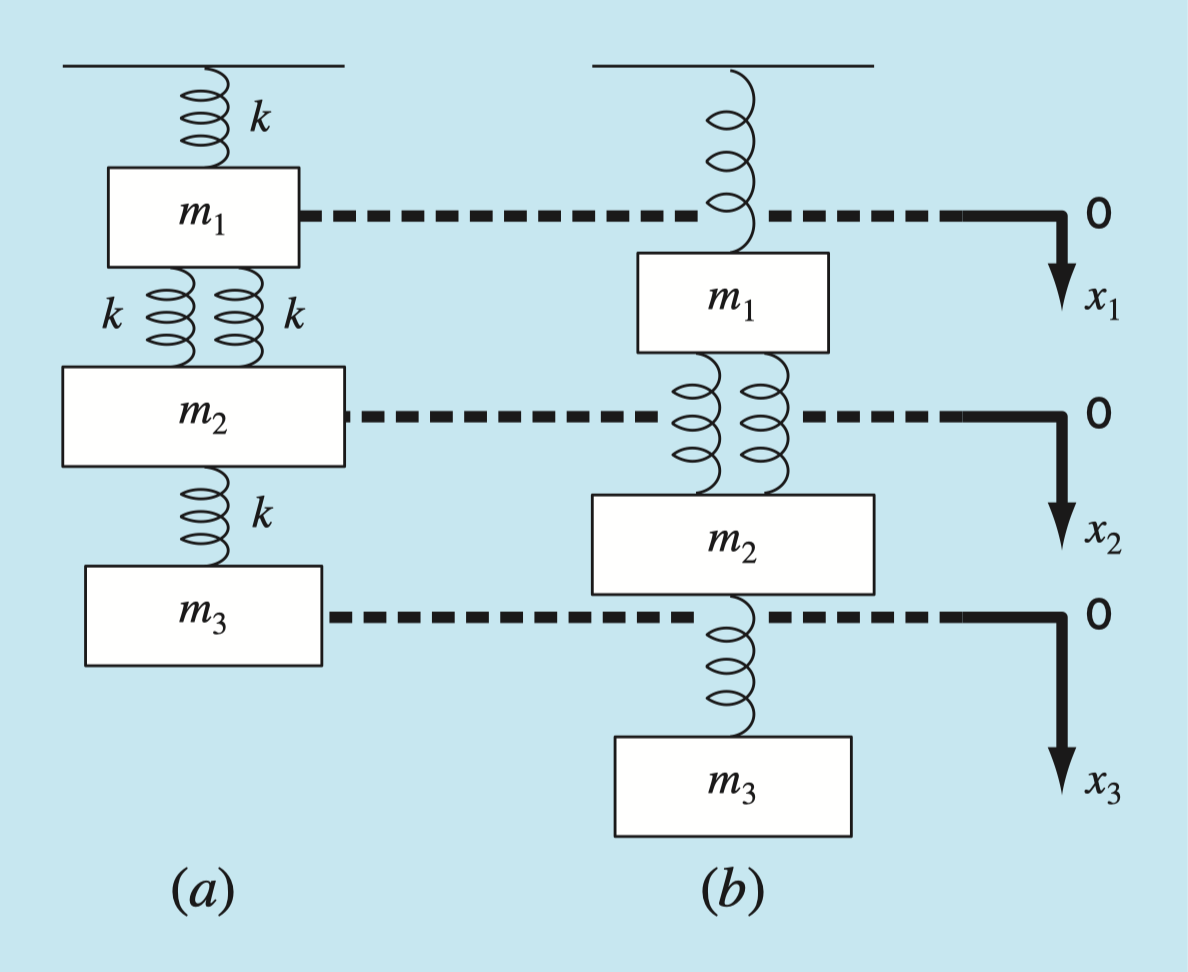
Given:
- \(k = 10\) N/m
- \(m_1 = 2\) kg, \(m_2=3\) kg, \(m_3 = 2.5\) kg
Find:
- \(x_1\), \(x_2\), and \(x_3\)
Assume the system is at-rest.
Engineering example
For each mass, \(\sum F = F_{up} - F_{down} = 0\)
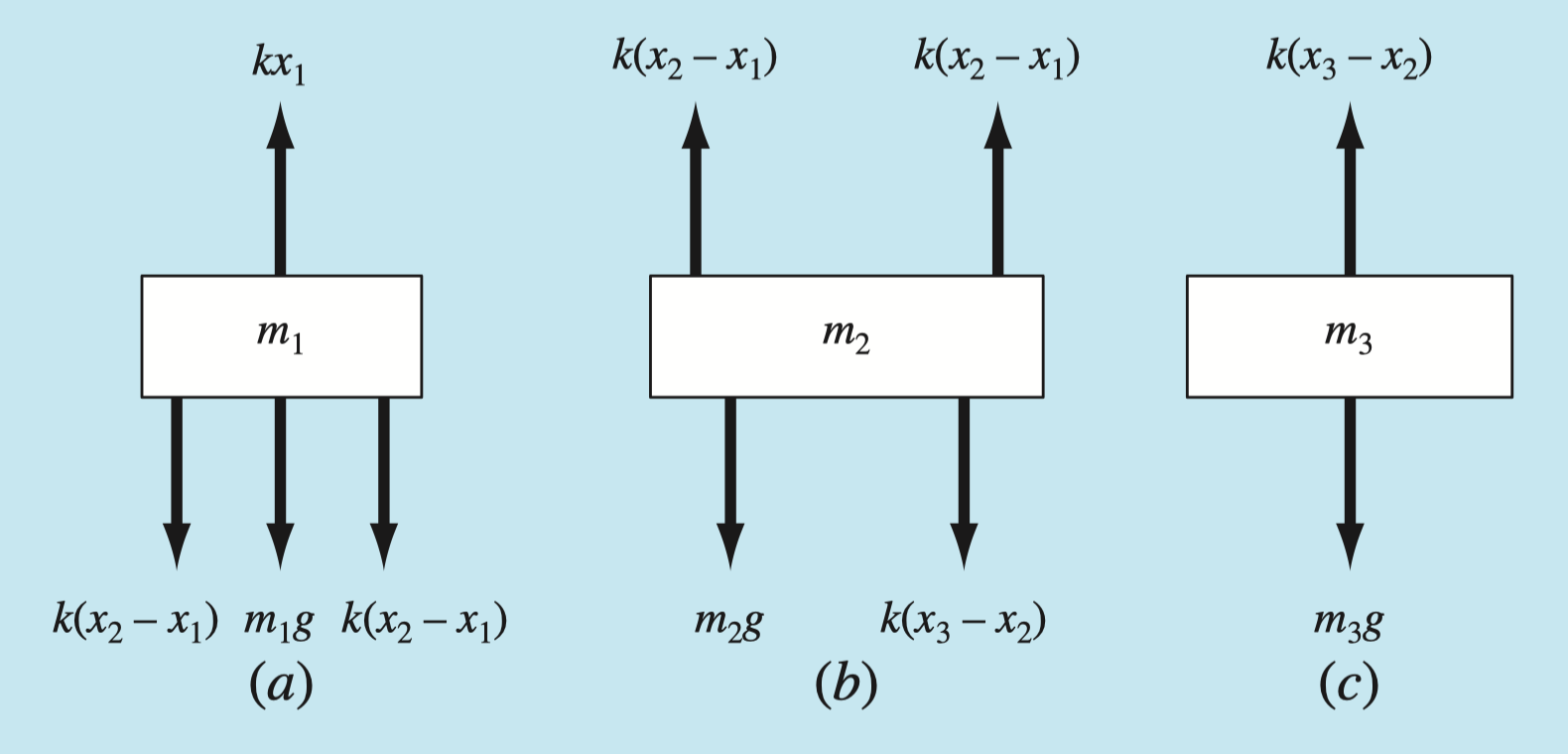
Engineering example
Summing forces on each mass:
\[ \sum F = kx_1 - 2k(x_2 - x_1) - m_1 g = 0 \]
\[ \sum F = 2k(x_2 - x_1) - k(x_3 - x_2) - m_2 g = 0 \]
\[ \sum F = k(x_3 - x_2) - m_3 g = 0 \]
Engineering example
Let’s group items by the unknowns, \(x_1\), \(x_2\), and \(x_3\), and move the gravitational forces to the other side:
\[ \begin{matrix} 3kx_1 & - 2kx_2 & \ & = & m_1 g \\ -2kx_1 & + 2kx_2 &-kx_3& = & m_2 g \\ \ & - kx_2 &+ kx_3 &=& m_3g \end{matrix} \]
Engineering example
And then put the system of equations into the form \(A{\bf{x}} = \bf{b}\):
\[ \begin{matrix} 3kx_1 & - 2kx_2 & \ & = & m_1 g \\ -2kx_1 & + 2kx_2 &-kx_3& = & m_2 g \\ \ & - kx_2 &+ kx_3 &=& m_3g \end{matrix} \]
\[ A= \begin{bmatrix} 3k & -2k & 0\\ -2k & 2k & -k \\ 0 & -k & k \\ \end{bmatrix} \]
\[ {\bf{x}} \to \begin{bmatrix} x_1\\ x_2\\ x_3\\ \end{bmatrix} \]
\[ {\bf{b}} \to \begin{bmatrix} m_1g\\ m_2g\\ m_3g\\ \end{bmatrix} \]
Mass-spring example in Python
Making it “singlular”
--------------------------------------------------------------------------- LinAlgError Traceback (most recent call last) Cell In[6], line 14 9 A = k * np.array([ 10 [0, -2, 0], 11 [0, 3, -1], 12 [0, -1, 1]]) 13 b = [m1*g, m2*g, m3*g] ---> 14 x = linalg.solve(A, b) 15 print(x) File ~/GitHub/TME_310_students/.venv/lib/python3.11/site-packages/scipy/_lib/_util.py:1233, in _apply_over_batch.<locals>.decorator.<locals>.wrapper(*args, **kwargs) 1231 # Early exit if call is not batched 1232 if not any(batch_shapes): -> 1233 return f(*arrays, *other_args, **kwargs) 1235 # Determine broadcasted batch shape 1236 batch_shape = np.broadcast_shapes(*batch_shapes) # Gives OK error message File ~/GitHub/TME_310_students/.venv/lib/python3.11/site-packages/scipy/linalg/_basic.py:272, in solve(a, b, lower, overwrite_a, overwrite_b, check_finite, assume_a, transposed) 269 gecon, getrf, getrs = get_lapack_funcs(('gecon', 'getrf', 'getrs'), 270 (a1, b1)) 271 lu, ipvt, info = getrf(a1, overwrite_a=overwrite_a) --> 272 _solve_check(n, info) 273 x, info = getrs(lu, ipvt, b1, 274 trans=trans, overwrite_b=overwrite_b) 275 _solve_check(n, info) File ~/GitHub/TME_310_students/.venv/lib/python3.11/site-packages/scipy/linalg/_basic.py:43, in _solve_check(n, info, lamch, rcond) 41 raise ValueError(f'LAPACK reported an illegal value in {-info}-th argument.') 42 elif 0 < info or rcond == 0: ---> 43 raise LinAlgError('Matrix is singular.') 45 if lamch is None: 46 return LinAlgError: Matrix is singular.